C
Cèliángfēnbiànlǜ 测量分辨率
数字系统中可传输测量值的最小细分。
Cèliángpínlǜ 测量频率
测量频率是指模拟量传感器信号的内部采样频率。
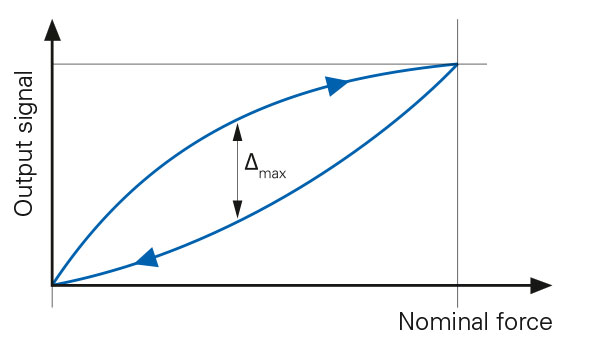
Chízhì 迟滞
迟滞又称“迟滞误差”,是指在理想安装条件下以及相同力作用下,力传感器的上行和下行输出信号值之差与满量程之比。影响迟滞的因素包括:传感器主体材料、测量原理,以及因测量装置引起的外部摩擦。
Chóngfùjīngdù 重复精度
重复精度是指传感器在不改变安装位置情况下的测量精度。传感器在受力相同时的输出信号之间的最大差值需在安装位置不变的情况下进行多次测量才能确定。对于仅安装一次的力传感器而言,重复精度至关重要。
Chuángǎnqìgāngdù 传感器刚度
传感器刚度是指力与传感器主体轴向形变之间的比值。传感器刚度对传感器的基础共振频率起决定性的影响。
Chúcúnwēndùfànwéi 储存温度范围
传感器在不通电的储存状态下,不会产生机械应力的温度范围,而当传感器在工作温度范围内再次使用时,其物理特性检测不到任何显著的永久性变化。
D
Diànqiáodiànyā 电桥电压
为无源传感器供电的稳定电源电压。
Diànqiáodiànzǔ 电桥电阻
整个测量电桥的电阻。
Diànqiáoshūchūdiànzǔ 电桥输出电阻
无源传感器的信号输出端sig+和sig-之间的电阻。
Diànqiáoshūrùdiànzǔ 电桥输入电阻
无源传感器的输入电压端子+VS和-VS之间的电阻。
Diànyuándiànyā 电源电压
在此电压范围内,传感器可在整个工作温度范围内长期运行,并且不会超出物理特性极限,也不会损害保护电路。
E
Edìngcèliánglùjìng 额定测量路径
额定测量路径是指力传感器的两个外力导入点或导入表面由于施加额定力而在测量方向上彼此相对经过的路径。膜片式力传感器的额定测量路径一般约为0.1mm。
Edìnglíngmǐndù 额定灵敏度
无源传感器在额定力作用下的比率输出信号。此输出信号与电桥电压(UE)成正比。
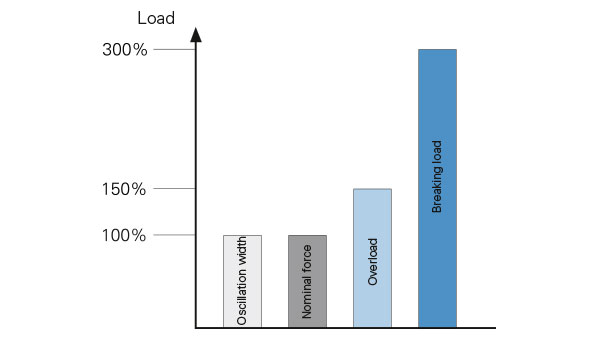
Edìnglì 额定力
额定力是指力传感器的名义设计量程,在不超过额定力的情况下,传感器满足计量规范要求。根据传感器的具体类型,可以区分额定力是指拉力还是压力。在下列技术规范中,百分比均基于额定力。
Edìngyìngbiàn 额定应变
额定应变是指传感器的名义设计量程,在不超过额定应变的情况下,传感器满足计量规范要求。在下列技术规范中,百分比均基于额定应变。
EMC
抗干扰性和防电磁辐射指令/标准。
F
Fángfǔshíbǎohù 防腐蚀保护
防腐蚀保护是指德国标准DIN EN ISO 12944-2中的某个防腐等级,符合该等级要求的传感器能够在某些特定的环境条件下安全使用,而不会有任何问题。
Fánghùděngjí 防护等级(DIN EN 60529)
防护等级表示传感器的防潮、防尘以及防止异物进入的能力。
Fùzǎidiànzǔ 负载电阻
力传感器所连接的测量系统的最小输入电阻。
Fùzǎi 负载
电流输出的最大负载电阻。负载是将信号电流转换为可以测量电压的电阻(模拟量输入卡的输入电阻)。
G
Gōngzuòdiànliú 工作电流
在额定工况下的最大工作电流;启动电流值在开始几毫秒内可能更高。
Gōngzuòwēndùfànwéi 工作温度范围
工作温度范围是指传感器满足物理技术规范要求的温度范围。
Guòzǎinénglì 过载能力
过载能力是指力传感器在单一载荷作用下仍能完全地正常工作并符合技术规范的最大力。此时,传感器不会发生任何塑性形变。
H
Héngxiàngjíxiànlì 横向极限力
在同时对力传感器施加额定力的情况下,不会导致传感器物理特性发生任何显著的永久性变化的最大允许静态横向力。
J
Jīchǔgòngzhènpínlǜ 基础共振频率
共振频率是指在没有任何力加载的情况下,力传感器部件在受到类似冲击力的激励后,以该频率在测量轴方向上发生振荡,其中用于固定传感器的基座已经与具有足够质量的物体连接在一起。
Jiézhǐpínlǜ 截止频率
在该频率下,输出信号衰减3dB(降至70.7%左右)。
Jíxiànniǔjǔ 极限扭矩
在同时对力传感器施加额定力的情况下,作用在测量轴周边而不会导致传感器物理特性发生任何显著的永久性变化的最大允许扭矩。
Jíxiànwānjù 极限弯距
在同时对力传感器施加额定力的情况下,不会导致传感器物理特性发生任何显著的永久性变化的最大允许静态弯矩。
Juéyuándiànzǔ 绝缘电阻
在设定的测试电压下,在任何连接电缆和传感器主体之间测得的电阻。
K
Kàngchōngjíxìng 抗冲击性(DIN EN 60068-2-27)
传感器的抗机械冲击性能,确保传感器在满量程情况下的计量特性不会发生任何显著的永久性变化。
Kàngsuíjīzhèndòngtèxìng 抗随机振动特性(IEC 60068-2-64)
传感器的抗振性,确保传感器在满量程情况下的计量特性不会发生任何显著的永久性变化。
Kàngzhènxìng 抗振性(DIN EN 60068-2-6)
传感器对于指定强度正弦振动的抵抗能力,确保传感器在满量程情况下的计量特性不会发生显著的永久性变化。
L
Língdiǎnwùchā 零点误差
零点误差表示传感器在拆卸后的零点信号与零值的最大差值相对于额定灵敏度的百分比。对于测量范围小于100N的力传感器,确保传感器位于非受力平坦表面至关重要。
Língmǐndùwùchā 灵敏度误差
传感器在额定载荷下的灵敏度与额定灵敏度之间的相对偏差。
P
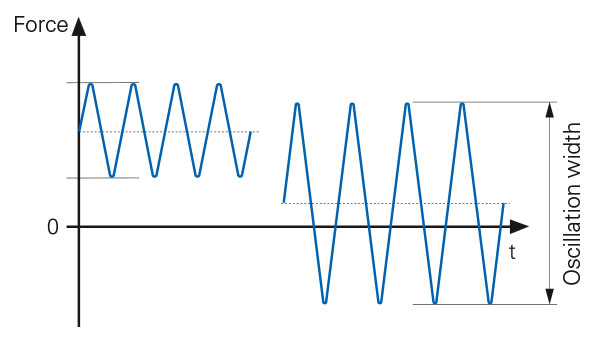
Píláoqiángdù 抗疲劳强度
与额定力大小相关的物理量,是指传感器在经历至少100万次动态载荷后,不会导致其计量特性发生永久性变化的极限载荷。该术语常在术语“相对振荡幅度”的文献资料中也有描述。
Q
Qīnglíngchùfādiànyā 清零触发电压
施加到清零端的电压至少要等于该电压值,才能确保清零功能可靠启动。
Qīnglíngliàngchéngfànwéi 清零量程范围
在该范围内可以对传感器进行清零,并将输出信号调节为零点信号。
Qīnglíngmàichōng 清零脉冲
清零脉冲是指电压超过UTa以启动清零功能所需的最短时间。
Qīnglíngshíjiān 清零时间
对传感器进行清零所需要的最长时间。
Qīnglíngsuǒdìngdiànyā 清零锁定电压
清零端的电压不得超过该电压值,才能确保清零功能不会启动。
R
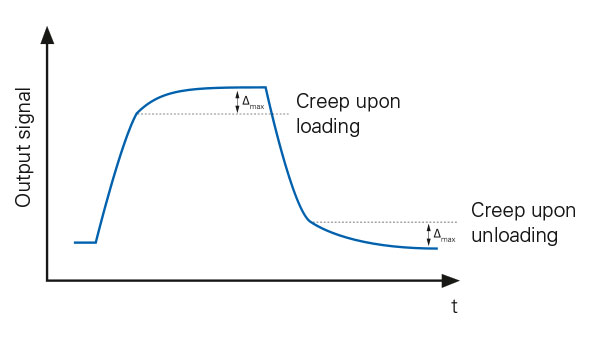
Rúbiànwùchā 蠕变误差
蠕变表示力传感器在恒定载荷作用下,其输出信号随时间推移而变化的特性。蠕变可分为加载蠕变和卸载蠕变,二者的不同之处在于:在测量加载蠕变时,需较长时间对传感器施加恒定外力,并检查测量信号的变化;在测量卸载蠕变时,首先对力传感器施加恒定额定力,然后卸除外力,分析测量信号的变化。
S
Shūchūxìnhào 输出信号
带内置放大器的传感器的输出信号类型。输出信号与额定力成正比。例如,如果额定力为100N的力传感器的电压输出范围为0-10V,那么0V对应0N,10V对应100N。
W
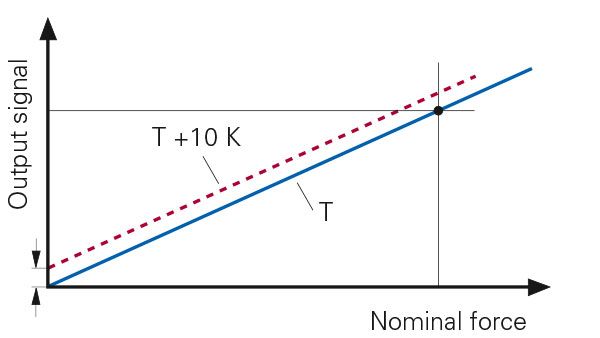
Wēndùduìlíngdiǎndeyǐngxiǎng 温度对零点的影响
TK0表示环境温度Ti每改变10K而导致力传感器零点信号相对于额定灵敏度发生的变化,其单位为%/10K。
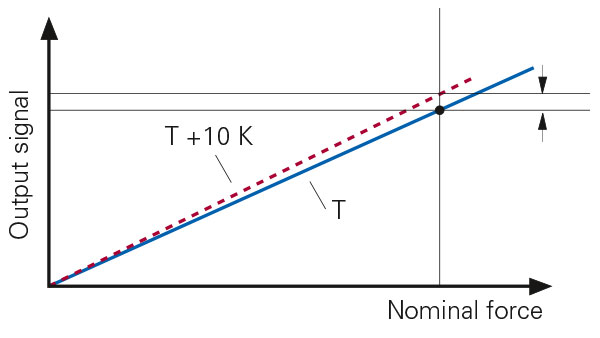
Wēndùduìlíngmǐndùdeyǐngxiǎng 温度对灵敏度的影响
TKE表示环境温度Ti每改变10K而导致力传感器灵敏度发生的相对变化,其单位为%/10K。
X
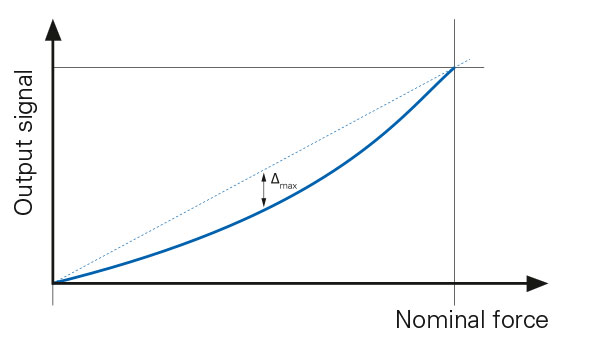
Xiànxìngwùchā 线性误差
线性误差是指在理想安装条件下传感器校准曲线偏离参考线的最大误差,其中校准曲线通过施加递增外力来测定,且参考线穿过零点。参考线是一次补偿函数,其斜率通过最小化信号偏离参考线的误差平方和(即加权最小二乘法)来确定。引起线性误差的主要原因通常是力的导入不对称。
Z
Zàixiànjīngdù 再现精度
再现精度是指传感器在改变安装位置情况下的测量精度。传感器在受力相同时的输出信号之间的最大差值需在不同安装位置进行多次测量才能确定。对于需频繁更换安装位置以便用于临时测量的力传感器而言,再现精度至关重要。
Zàoshēng 噪声
在指定频率范围内输出信号噪声的有效值。
Zhèngxiàngshūchūxìnhào 正向输出信号
输出信号随指定方向力的变化而呈现正向变化。
Zuìxiǎoduànlièlì 最小断裂力
最小断裂力是指可能使传感器发生机械损坏的最小力。如果载荷超过最小断裂力,则不建议继续使用该传感器。