China
cn
中文
测力时的注意事项
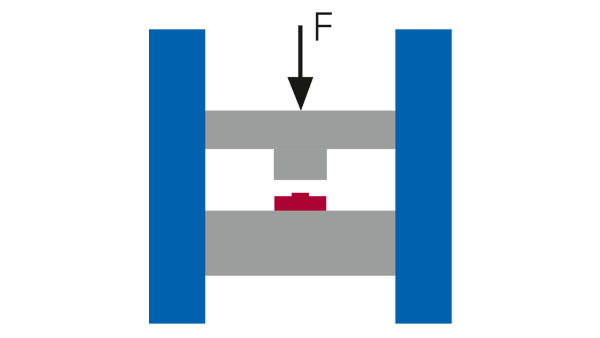
在使用力传感器测力时,力传感器必须直接安装在受力处,并确保整个力在传导过程中通过力传感器。需要注意的是,力必须施加在正中位置,并确保接触面具有足够的刚度。
力传感器的工作原理
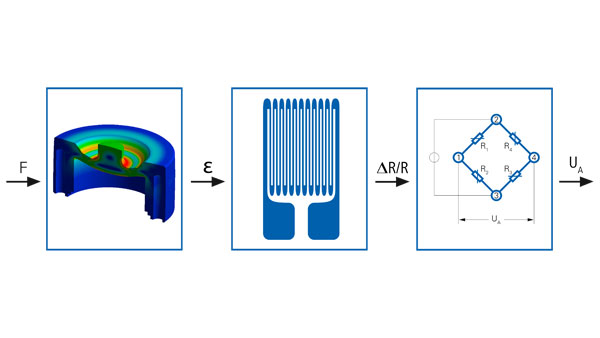
应变式力传感器仅需三个步骤即可将机械形变转换成电信号。应变式力传感器工作的第一步是通过一个弹性部件来感应外力造成的应变。
该应变通过贴在弹性部件表面的应变片测得。应变片将机械应变转换为电阻变化,相当于一个机械电子信号转换器。而电阻变化会导致与所受力成正比的电压变化。各应变片以特定方式连接成惠斯通电桥,即便是极微小的应变也能测量到。
该应变通过贴在弹性部件表面的应变片测得。应变片将机械应变转换为电阻变化,相当于一个机械电子信号转换器。而电阻变化会导致与所受力成正比的电压变化。各应变片以特定方式连接成惠斯通电桥,即便是极微小的应变也能测量到。
应变式力传感器的重要优势:
- 对于力传感器来说,应变原理是一种可靠且经济高效的技术
- 测量精度高,线性误差和迟滞误差极低
- 应变片彼此连接,形成惠斯通电桥,可实现极为出色的温度补偿功能
- 可测量静态和动态载荷
- 传感器主体精选合适的材料,抗疲劳强度极高;应变片具有出色的抗振性
- 极佳的长期稳定性
弹性部件——机械转换器
应变式力传感器工作的第一步是弹性部件在外力作用下发生形变。这种设计的优势在于其形变属于弹性形变。由于形变不会超出弹性极限,因此当外力消失后,弹性部件又会回到不受外力时的初始形状。
力传感器的材质
堡盟力传感器通常采用高强度不锈钢(1.4542)制成。针对特殊的应用领域,堡盟还提供由回火钢、铝或其他合金制成的力传感器。
力传感器的材质
堡盟力传感器通常采用高强度不锈钢(1.4542)制成。针对特殊的应用领域,堡盟还提供由回火钢、铝或其他合金制成的力传感器。
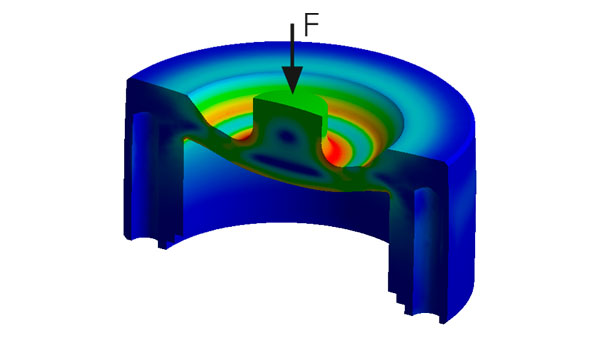
在设计弹性部件时,既要选择尽可能柔软的结构来实现最佳测量性能,又要考虑材料极限性能的限制——如何解决这一矛盾是设计人员必须面对的挑战。借助复杂的计算机辅助有限元(FEM)仿真,弹性部件在弹性极限内成功实现尽可能最大的应变,其目的是为了形成一个形变量一致的区域,然后可以将应变片贴在该区域。随后,根据公认的FKM指南进行强度评估,从而确保力传感器的抗疲劳强度。这意味着堡盟力传感器即便连续工作100万次力加载循环,也能在满量程的情况下完成动态测量。
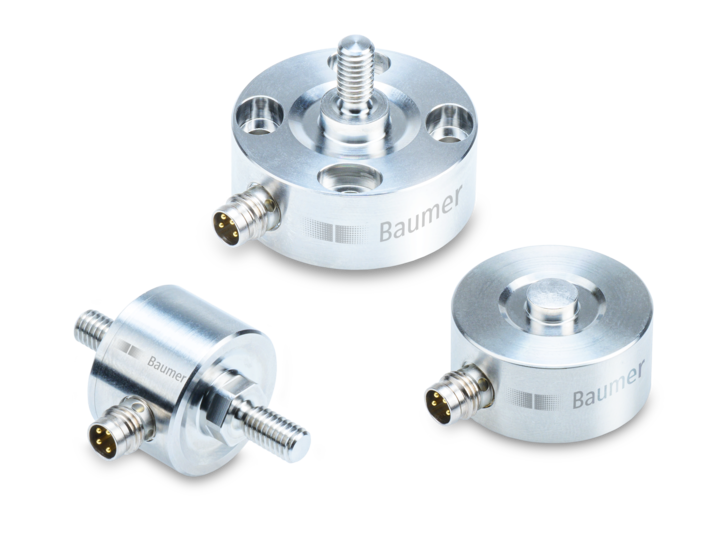
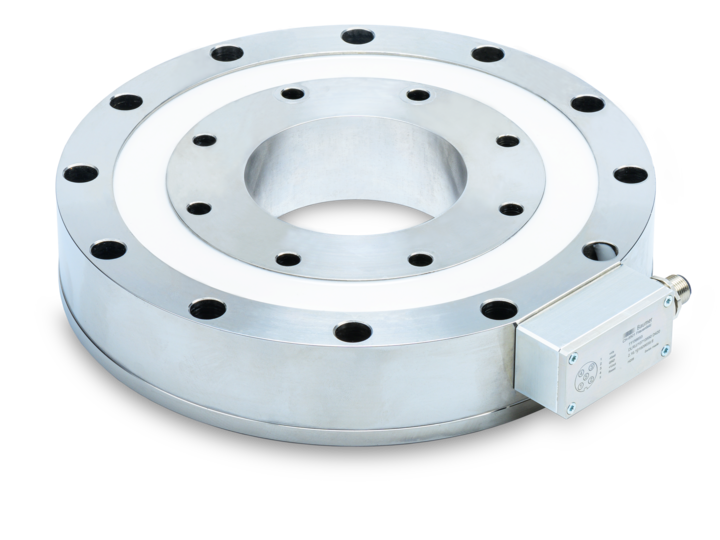
结构类型
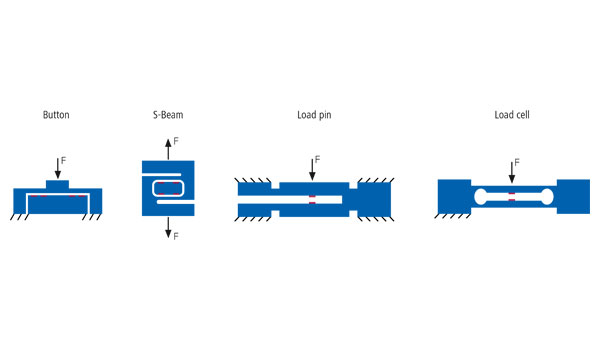
堡盟力传感器的设计通常采用弹性部件。这种弹性部件的决定性优势在于其直径非常小,而且生产成本相对较低。此外,应变式力传感器通常可以完全密封,因此适用于苛刻的应用环境。其他设计类型包括:S形弹性部件、圆柱形弹性部件或悬臂梁设计。
堡盟力传感器的设计通常采用弹性部件。这种弹性部件的决定性优势在于其直径非常小,而且生产成本相对较低。此外,应变式力传感器通常可以完全密封,因此适用于苛刻的应用环境。其他设计类型包括:S形弹性部件、圆柱形弹性部件或悬臂梁设计。
应变片——机械电子信号转换器
应变片是堡盟力和应变力传感器中的核心元件,用于材料表面的应变测量。应变片通常由聚酰亚胺基底膜、铜镍合金材质的锯齿状测量网路和表面保护层组成。应变片将机械应变转换为电阻变化,相当于一个机械电子信号转换器。应变片的电阻变化与应变成正比,其中灵敏系数以K表示。
设计
传感器采用的金属应变片有多种不同的设计。除了常规的线性应变片以外,T型应变花、应变花和剪切式应变片也是常见的设计:
设计
传感器采用的金属应变片有多种不同的设计。除了常规的线性应变片以外,T型应变花、应变花和剪切式应变片也是常见的设计:

惠斯通电桥
惠斯通电桥是一种特殊的电阻电路,可用于精确测量电阻变化。在传感器中使用的惠斯通电桥,四个应变片通常按照特定的排列方式相互连接。这种全桥式电路由两个并联的分压器组成,分压器由来自普通电压源的桥式电源(UB)供电。
惠斯通电桥是一种特殊的电阻电路,可用于精确测量电阻变化。在传感器中使用的惠斯通电桥,四个应变片通常按照特定的排列方式相互连接。这种全桥式电路由两个并联的分压器组成,分压器由来自普通电压源的桥式电源(UB)供电。
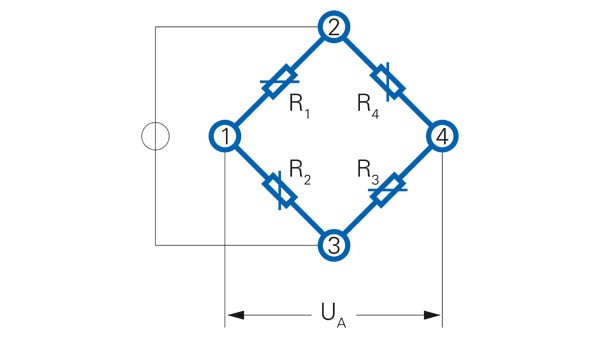
通过惠斯通电桥,即便是极微小的电阻变化,也能准确检测出。如果某个应变片的电阻发生变化,则会引起电桥偏置电压(UA),这种偏置电压可轻松测得。电桥的测量信号与机械形变和电源电压成正比。应变式力传感器的测量信号一般在0.4至3.0mV/V之间。
温度特性
测量过程中的温度变化是应变式力传感器必须应对的一大挑战。10°C的温度变化便足以使100mm长的钢条发生0.012mm的绝对变化。选择热膨胀系数适合的应变片并将其按照惠斯通电桥电路彼此连接,这样即可补偿因温度变化引起的热胀冷缩效应。
温度特性
测量过程中的温度变化是应变式力传感器必须应对的一大挑战。10°C的温度变化便足以使100mm长的钢条发生0.012mm的绝对变化。选择热膨胀系数适合的应变片并将其按照惠斯通电桥电路彼此连接,这样即可补偿因温度变化引起的热胀冷缩效应。
桥式放大器——电子信号转换器
桥式放大器可为惠斯通电桥提供稳定的电源电压。电桥产生的输出信号经放大后,既可以作为模拟量输出(电压输出/电流输出),也可以通过数字量接口(CAN/ IO-Link)输出。堡盟桥式放大器目前可提供±10VDC的电压输出和4-20 mA的电流输出。
力测量的基本物理原理
力的定义和计算公式
力F(单位N)等于物体质量m(单位kg)与重力加速度g(单位m/s2)的乘积。
力F(单位N)等于物体质量m(单位kg)与重力加速度g(单位m/s2)的乘积。

例如,如果一个物体的质量为100kg,其重力就是1,000N。在实际计算中,重力加速度g可以粗略地取作10 m/s2。
应变的定义和计算方式
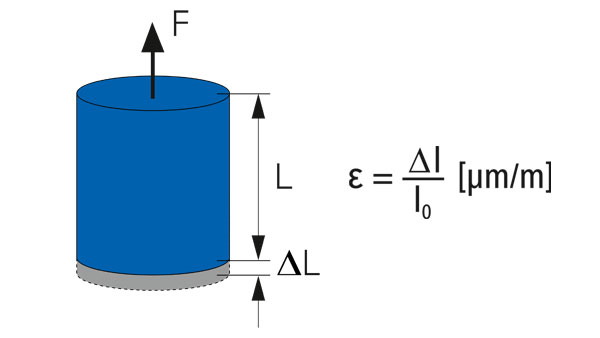
物体在受到压力作用时会被压缩,受到拉力时则会伸长。这种长度的相对变化量称为应变ε(µm/m),其定义为长度增量Δl与原长度l0之比。
物体在受到压力作用时会被压缩,受到拉力时则会伸长。这种长度的相对变化量称为应变ε(µm/m),其定义为长度增量Δl与原长度l0之比。
弹性模量(MOE)
物体的实际伸长率不仅取决于其几何形状和外力大小,而且还受物体材料特性的影响,其中起决定性作用的是弹性模量。弹性模量表示固体材料在弹性限度内发生形变的过程中应力与应变之比。因此,材料的刚度越高,其弹性模量就越大。力传感器中使用的标准不锈钢的弹性模量(E)为200,000 N/mm2,铝材的弹性模量为70,000 N/mm2。
物体的实际伸长率不仅取决于其几何形状和外力大小,而且还受物体材料特性的影响,其中起决定性作用的是弹性模量。弹性模量表示固体材料在弹性限度内发生形变的过程中应力与应变之比。因此,材料的刚度越高,其弹性模量就越大。力传感器中使用的标准不锈钢的弹性模量(E)为200,000 N/mm2,铝材的弹性模量为70,000 N/mm2。
从力到应变
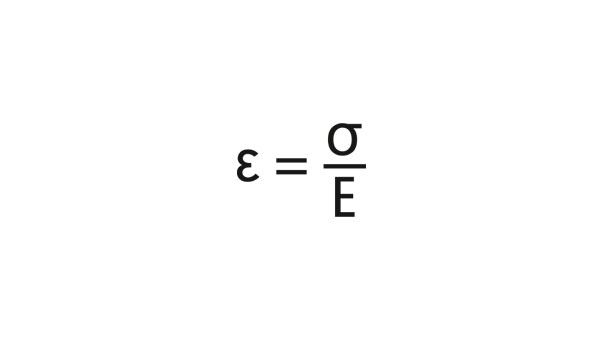
如上所述,物体在外力F作用下会发生一定程度的应变ε。这种应变通常由材料的弹性模量E、横截面积A和外力大小决定。通过这三个参数,就可以计算出应变,计算公式如下:
如上所述,物体在外力F作用下会发生一定程度的应变ε。这种应变通常由材料的弹性模量E、横截面积A和外力大小决定。通过这三个参数,就可以计算出应变,计算公式如下:
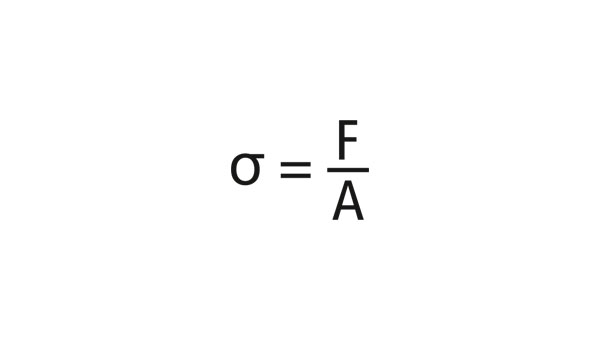
其中应力σ按以下公式计算:
灵敏系数K
灵敏系数K表示应变片的灵敏度。该物理量表明电阻相对变化和材料的应变呈线性关系。
灵敏系数K表示应变片的灵敏度。该物理量表明电阻相对变化和材料的应变呈线性关系。
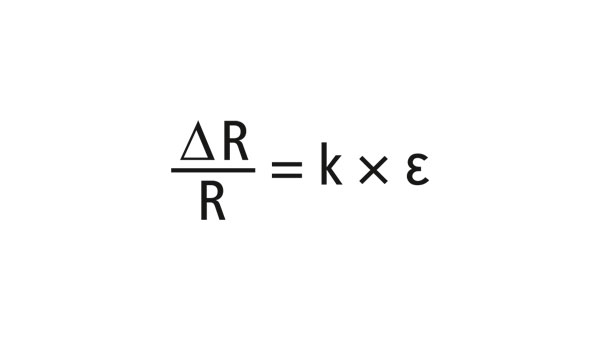
铜镍合金应变片的灵敏系数K一般为2.05。
惠斯通电桥方程式
得到应变ε和灵敏系数K后,通过惠斯通电桥方程式即可计算出测量信号。借助典型的悬臂梁设计,就可以计算出测量信号,计算公式如下:
得到应变ε和灵敏系数K后,通过惠斯通电桥方程式即可计算出测量信号。借助典型的悬臂梁设计,就可以计算出测量信号,计算公式如下:
需要注意的是,两个应变片受的是拉力,另两个应变片受的是压力。理想情况下,应变值在所有测量点均保持一致。
测力与称重的区别
堡盟的项目经理或研发工程师在工程机械等设备上开展过无数次的称重测试。从物理原理来看,力传感器和称重传感器并无差异。二者唯一的区别在于校准方式不同:力传感器始终按照额定力(单位N)来校准,而称重传感器则按照规定的重量(单位kg)进行校准。堡盟传感器用于测力,因此采用力传感器的校准方式。
力传感器的适用标准
力传感器的特征参数按照德国标准VDI2638进行定义。该标准中的定义可作为力传感器领域的通用技术语言,用户可据此与技术数据表进行比较。有关具体特征参数的更多信息,请参见堡盟测力术语表。